Abstrakt: Vo svete technologického pokroku, ktorý predstavuje exponenciálny trend, je prirodzenosťou spájanie rôznych oblastí za účelom zvýšenia ich efektívnosti v praxi. Počítačové simulácie a výpočtová technika poskytuje vo všeobecnosti obrovskú úsporu času prostredníctvom simulácie scenárov, ktoré nie je potrebné experimentálne a opakovane prevádzať za účelom optimalizácie procesov. Práve využitie IT technológií predstavuje inovatívny prístup v optimalizácií prevádzky bezpilotných lietajúcich prostriedkov (UAV) v rojom lietaní. Výskum sa zaoberá návrhom virtuálnej infraštruktúry a experimentálneho prevedenia v simulačnom prostredí. Výsledky preukazujú využiteľnosť najmä v procese optimalizácie energetickej využiteľnosti, zvyšovania bezpečnosti a v neposlednom rade znižovaniu finančnej náročnosti vývoja UAV nie len pre dopravné aplikácie. Výstupom predkladaného článku je sumarizácia možností využitia softvérových nástrojov Matlab a Simulink v procese synchronizácie letu UAV v dopravných aplikáciách na zber údajov. Takéto lety poskytnú nové možnosti v zvyšovaní efektívnosti dopravy ako takej, vďaka integrácií najnovších poznatkov a technológií, ktoré hrajú kľúčovú rolu v rozvoji dopravy.
Kľúčové slová: UAV, simulácia, roj, skupina, dopravné procesy
JEL: O – Economic Development, Technological Change, and Growth (Hospodársky vývoj, technologické zmeny a rast)
The Computer Simulations Use of the Synchronized Group of UAVs Application in Transport Processes
Abstract: In a world of exponential technological advances, it is only natural to bring together different fields in order to make them more effective in practice. In general, computer simulation and computing provides enormous time savings through the simulation of scenarios that do not need to be experimentally and repeatedly performed in order to optimize processes. It is the use of IT technology that represents an innovative approach in optimizing the operation of unmanned aerial vehicles (UAVs) in swarm flying. The research deals with virtual infrastructure design and experimental execution in a simulation environment. The results demonstrate applicability especially in the process of optimizing energy availability, increasing safety and last but not least reducing the financial complexity of UAV development not only for transport applications. The output of the present paper is a summary of the possibilities of using Matlab and Simulink software tools in the process of UAV flight synchronization in transport applications for data collection. Such flights will provide new opportunities in increasing the efficiency of transportation as a whole, thanks to the integration of the latest knowledge and technologies that play a key role in the development of transportation.
Keywords: UAV, Simulation, Swarm, Formation, Transport Processes
1 Úvod
Využitie bezpilotných dopravných prostriedkov (UAVs) má široké pole pôsobnosti. Ich spôsob použitia, vlastnosti a možnosti umožňujú použitie daných prostriedkov v sektoroch dopravy, ozbrojených síl, poľnohospodárstva, pátranie a záchranu, mapovania terénu a mnohých ďalších [1][3][4]. Niektoré štúdie sa zaoberajú využitím UAVs pre jednotlivé úlohy v samotnom leteckom priemysle, ako je inšpekcia lietadiel [10]. Dôležitou súčasťou pri použití UAV je možnosť ich použitia vo zvýšenom počte. V prípade letu takýchto prostriedkov a s použitím rojového lietania, je možné využiť plný potenciál letu vo formáciách. Takýto let je z hľadiska zabezpečenia bezpečnej letovej prevádzky komplikovaný a vyžaduje si komplexné zariadenia, umožňujúce let v dostatočných separátnych vzdialenostiach, komunikačných zariadení, prenosu dát či podľa špecifikácie účelu ďalšie nevyhnutné vlastnosti, ako sú schopnosť visenia, autonómne lietanie, použitie špeciálnych senzorov a iné [5][9]. Pre operáciu takýchto zariadení sú potrebné určité znalosti a zručnosti k zabezpečeniu bezpečnej a účelnej operácie. Okrem toho, je podľa legislatívy povinnosťou obsluhujúceho prevádzkovateľa UAV, vlastniť povolenie na riadenie bezpilotného dopravného prostriedku [11]. Z tohto dôvodu je využitie počítačových simulácií výhodnou pomôckou, ktorá môže značne ušetriť časové a finančné náklady.
Simulačný program, ktorý by dokázal reálne zosimulovať všetky atmosférické podmienky by zahrňoval množstvo dát, ktoré by reprezentovali reálny sily pôsobiace na UAV počas letu. Ďalej je potrebné zahrnutie dynamiky motorov, pôsobenia poveternostných podmienok, simulácia elektronického vybavenia a množstvo ďalšieho [2]. Vzhľadom na skutočnosť, že každý objekt, ktorý sa pohybuje prostredím, má svoje špecifické parametre, je vyžadujúce vytvoriť prvotný návrh dopravného prostriedku s charakteristickými vlastnosťami. Následná tvorba virtuálneho prostredia si vyžaduje softvér, ktorý dokáže konvertovať údaje o pohybe síl prostredím do simulácie.
Na vytváranie virtuálneho prostredia pre simuláciu UAVs je možné použiť viacero softvérov. V závislosti od komplexnosti definovaného zadania je možné použiť viacero softvérov. Výkonnostná analýza viacerých programov poskytuje možnosť výberu optimálnej možnosti. Medzi takéto programy patrí X-Plane, FlightGear, Gazebo, JMavSim, AirSim,UE4Sim a iné [6]. Na základe výkonnostnej analýzy bol zvolený softvér MATLAB Simulink, ktorý slúži na spracovávanie zadávaných údajov. S využitím Unreal Engine je možné pripojiť výstup zo Simulinku a v 3D zobrazení znázorniť pohyb UAV prostredím. Okrem takéhoto zobrazenia je možné získavať výstupy z akejkoľvek časti veľmi komplexného súboru rovníc vo forme dát, tabuliek či grafov.
2 Metodika
Tvorba virtuálneho prostredia je komplexný proces pozostávajúci z chronologickej postupnosti. Dodržanie správnej postupnosti je kľúčovým faktorom k tvorbe precízneho systému. Pre zjednodušenie vytvárania simulačného programu je použitá možnosť tvorby systémovej architektúry, za ktorou nasleduje tvorba samotného simulačného prostredia.
2.1 Tvorba architektúry simulačného programu
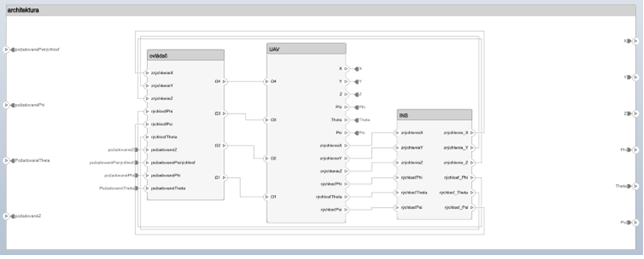
Architektúra vytvorená v programe Simulink poskytuje možnosť rýchleho vytvorenia blokových dynamických súčastí prostredia. Každý blok reprezentuje jednu špecifickú časť UAV, ktorá koreluje či odosiela údaje do ďalšieho bloku. Architektúra poskytuje využitie vrstvenia, ktoré tvorí reálnu činnosť komponentov, ktoré spolupracujú pri určitých podmienkach. Pre daný systém boli zvolené nasledovné komponenty: ovládač, inerciálny navigačný systém a samotný model kvadrokoptéry zahrňujúci fungovanie motorov a simulácie baterky. Na Obrázok 1 je znázornená prvá vrstva kvadrokoptéry. Jednotlivé bloky v sebe zahŕňajú ďalšie sub-komponenty, ktoré vytvárajú komplexný dynamický systém. Architektonicky navrhnutý model umožňuje sledovanie putovania signálov a spolupráce blokov. Program dokáže sám identifikovať chyby, ako napríklad zdvojenie či strata signálu.
Zdroj: Vlastné spracovanie
Obrázok 1 Prvá vrstva architektúry modelu kvadrokoptéry
2.2 Opis požadovaných parametrov a pôsobiacich síl
Systém je založený na požiadavke dosiahnuť určitú pozíciu UAV vo virtuálnom prostredí. K tejto skutočnosti sú použité kinetické rovnice, ktoré definujú pohyb pozdĺž a okolo osí. V súradnicovom systéme sú použité 3 osi, X, Y a Z. Pričom model UAV a aj samotné prostredie majú svoje nezávislé prostredia, a ich relatívny pohyb je založený na pôsobení týchto súradnicových systémov medzi sebou [7].
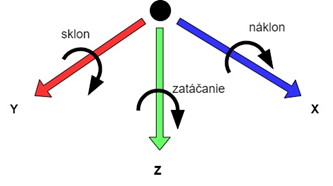
K opisu pohybu UAV je sú použité kinetické rovnice založené na uhlovom zrýchlení osi motorov, znázornených na Obrázok 2, a ktoré sú zhrnuté v Tabuľka 1 [8].
Zdroj: Vlastné spracovanie
Obrázok 2 Grafické znázornenie pohybu kvadrokoptéry okolo osí
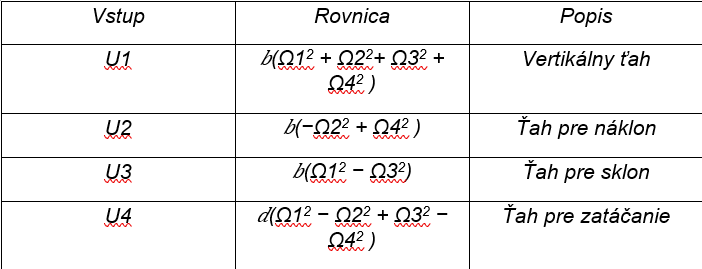
Tabuľka 1 Opis kinetických rovníc na pohyb UAV okolo osí
Zdroj: Vlastné spracovanie
U1, U2, U3 a U4 sú jednotlivé veľkosti ťahu pre každý motor. Veličina b určuje koeficient vztlaku a Ω značí uhlovú rýchlosť daného motora. Predpokladom pre tvorbu virtuálneho UAV je použitie protichodných vrtúľ na protiľahlých osiach, čím sa eliminuje akýkoľvek zatáčavý moment. Ďalej je možné určiť:

(1)
,kde uvádza celkovú uhlovú rýchlosť. Ďalej je možné zadefinovať rovnice opisujúce zrýchlenia okolo osí X, Y a Z, teda pre náklon, sklon a zatáčanie, pre ktoré platí:

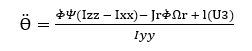
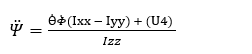
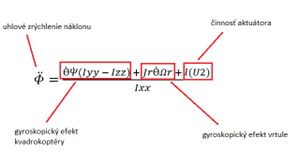
Hodnota určenia uhlového zrýchlenia pred náklon, pre sklon, pre zatáčanie využíva pre svoj opis hodnoty rýchlosti pre sklon, pre náklon a pre zatáčanie. Hodnoty Iyy, Izz a Ixx označujú momenty zotrvačnosti v jednotlivých osiach, Jr označuje rotorovú inerciu a l je vzdialenosť osi motora od ťažiska. Funkcia jednotlivých častí rovníc je znázornená na Obrázok 3.
Zdroj: Vlastné spracovanie
Obrázok 3 Popis jednotlivých funkcií rovnice pre pohyb okolo osí
Okrem opisu pohybu okolo osí je potrebné definovať tie pohyby, ktoré idú pozdĺž osí. Pre tieto výrazy platia vzťahy:



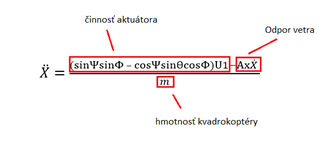
Veličiny Ax, Ay a Az vyjadrujú odpor vzduchu pre každú os, m je hmotnosť a g gravitačné zrýchlenie. , , určujú pozíciu v danej osi. Podobne ako pri pohybe okolo osí, zobrazuje Obrázok 4 formu funkcie rovnice.
Zdroj: Vlastné spracovanie
Obrázok 4 Popis jednotlivých funkcií rovnice pre pohyb pozdĺž osí
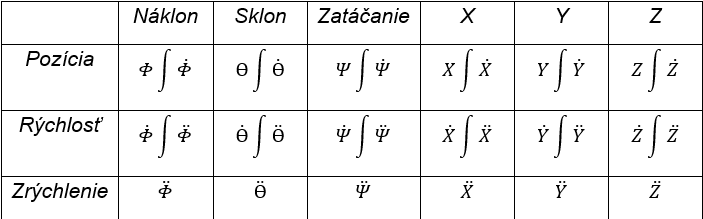
Z vyjadrených hodnôt o zrýchlenia v daných osiach a okolo nich je možné získať všetky potrebné údaje na základe ich integrovania podľa Tabuľka 2.
Tabuľka 2 Využitie integrácií pre získavanie údajov o rýchlosti a pozícií
Zdroj: Vlastné spracovanie
2.3 Tvorba dynamického blokového systému
Po definovaní jednotlivých veličín dochádza k tvorbe dynamického systému, ktorého správanie opisujú rovnice pohybu.
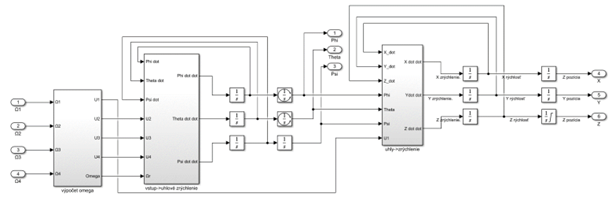
Prvý krokom je tvorba výpočtového bloku, kedy dochádza ku konverzii údajov o uhlovej rýchlosti jednotlivých motorov na tvorbu ťahu. Tieto údaje sú ďalej vysielané do ďalšieho bloku, kde dochádza k ich konverzii na pohyb okolo osí. Následnými integráciami je možné získať údaje o momentálnej rýchlosti a pozícii kvadrokoptéry v súradnicovom systéme. Pozícia okolo osi je vedená a spracovávaná pre zisk údajov polohy UAV pozdĺž osi. Pre dané integrácie je možné určiť limity, ktoré obmedzia pohyb sklonu a náklonu na maximálnu úroveň 90°. Obrázok 5 zobrazuje schému zapojenia blokov a výstupy, ktorými sú poloha UAV v troch osiach [7].
Zdroj: Vlastné spracovanie
Obrázok 5 Schéma dynamického systému kvadrokoptéry
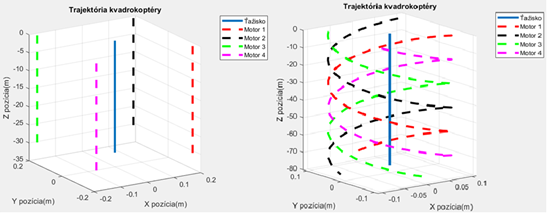
Po zadávaní vstupných údajov je možné premietať výsledný pohyb UAV v grafickej forme. Následná vizualizácia na poskytuje prehľad o pohybe UAV na základe prvotných údajov.
Zdroj: Vlastné spracovanie
Obrázok 6 Graficky znázornený pohyb UAV v 3 osiach
2.4 Tvorba dodatočných komponentov
Táto sekcia zahŕňa tvorbu elektronického vybavenia. V tomto prípade je opísaná funkcia batérie, inerciálneho systému a ovládača PID.
Batéria je zdrojom energie, bez ktorého by akýkoľvek reálny model UAV nemohol vykonávať svoju činnosť. Vstup pre batériu je odber prúdu a výstupom je napätie. Dôležitým bodom pri tvorbe batérie je definícia stavov a parametrov. Medzi stavy sa radia stav nabitia, napätie, prúd a teplota. Medzi parametre sa radí kapacita batérie a rýchlosť vybíjania.
Pre tvorbu modelu bola definovaná LiPo batéria s príslušnými charakteristikami. Batéria je jedným z prvkov, ktoré značne ohraničujú možnú prevádzku. V súčinnosti s motormi, by vyššie ako dovolené hodnoty prúdu či napätia mohli spôsobiť poškodenie komponentov. Príliš nízke hodnoty by mohli naopak spôsobiť nedodržanie stanovených požiadaviek, napríklad na dĺžku letu.
Pred samotnou tvorbou blokovej schémy je opäť potrebné opísať rovnice definujúce spôsob správania batérie a jej komponentov. Rýchlosť otáčania motorov (RPM) je definovaná ako súčin napätia a pomeru KV, ktorý predstavuje, ako rýchlo sa dokáže motor otáčať pri dodávke napätia 1V.
Konštantný vybíjací prúd a maximálny vybíjací prúd určujú, aké je množstvo dodávaného prúdu pre bezpečnú dodávku z batérie. Pre výpočet kontinuálneho prúdu sa používa vzťah kapacity batérie vynásobenej konštantným vybíjacím prúdom, alebo maximálnym vybíjacím prúdom pre „burst current“, ktorý tvorí hranicu maximálneho prúdu, ktorý dokáže motor krátkodobo zvládnuť.

Ostatné fyzikálne vlastnosti batérie ako hmotnosť a rozmery ovplyvnia výpočty momentu zotrvačnosti.
Ďalším vybavením UAV je inerciálny systém. Pri pohybe kvadrokoptéry v reálnom svete zohrávajú úlohu mnohé faktory, ktoré môžu spôsobiť vychýlenie v ktorejkoľvek osi, napr. vplyvom vetra. V takom prípade je potrebné zaviesť do modelu spätnú väzbu, ktorá formou snímačov monitoruje súčasnú polohu a porovnáva ju s tou definovanou. Táto korekcia sa vykonáva pomocou gyroskopov a akcelerometrov. Tieto snímače sú umiestnené v blokovej schéme inerciálnej meracej jednotke (IMU). Kým gyroskop poskytuje údaje o uhlovej rýchlosti, akcelerometer poskytuje údaje o axiálnom zrýchlení. Pre modelovanie reálnejšieho snímania sa do schémy zapája skreslenie, šum a oneskorenie.
Údaje zo snímačov sa privádzajú do riadiacej jednotky ako informácia o rýchlosti sklonu, náklonu a zatáčania či zrýchlenia v osi X, Y a Z. Pre modelovanie je potrebné stanoviť nulové body pre snímače. Pre gyroskopy sú to hodnoty nulovej rýchlosti okolo každej osi. Pre akcelerometre sú to nulové zrýchlenia v osi X a Y, ale v osi Z je to gravitačné zrýchlenie. Pre výstup zo snímačov platí vzťah:

kde: Kbias = skreslenie,
LowPass = dolnopriepustný filter,
Noise = šum.
Na dosiahnutie presnejších výsledkov, kedy dochádza k transformácii údajov medzi zrýchlením súradnicového systému UAV voči súradnicovému systému prostredia pomocou rotačných matíc, je potrebné použiť rovnaké rotačné matice na transformáciu údajov opäť smerom naspäť, teda od súradnicového systému prostredia na súradnicový systém UAV. Konverzia týchto údajov prebieha podľa vzťahu:

Samotný blok IMU obsahuje dve vetvy, ktoré rozdeľujú funkciu akcelerometra a gyroskopu. Snímače prijímajú signály priamo z bloku kvadrokoptéry, takže pred vstupom musia byť v prípade akcelerometra upravené. Integráciou uhlovej rýchlosti okolo osí sa získa ich poloha, ktorej údaj prechádza výpočtom rotačnej matice a signál putuje do sub-bloku akcelerometra. V prípade rotácie okolo osi X a Y sú integrácie limitované na dosahovanie maximálnych hodnôt -Π a +Π.
Parametre, ktoré musia byť ovládané pri lete UAV sú výška, rýchlosť náklonu, sklonu a zatáčania. Tieto veličiny sa určujú veľkosťou vytvoreného ťahu na jednotlivých motoroch. Pomocou ovládača je veľmi zložité udržiavať požadovanú polohu či výšku kvadrokoptéry, preto je potrebné vytvoriť ovládač, ktorý bude vytvárať také signály, ktoré vyhovujú požadovaným parametrom polohy a výšky.
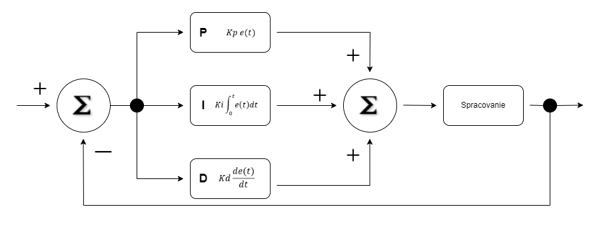
Pre vytvorenie takéhoto modelu sa použije tzv. PID ovládač (P- proportional, I- Integral, D- derivative). Každá časť takéhoto ovládača má svoj účel. Časť P (proporcionálna) vytvára všeobecné zosilnenie signálu pre systém. Časť I (integrálna) upravuje zosilnenie akumuláciou chybného signálu. Časť D (derivačná) upravuje zosilnenie sledovaním sklonu chybného signálu. Všetky 3 časti PID sa sčítavajú a vytvárajú vstup pre daný model.
Zdroj: Vlastné spracovanie
Obrázok 7 Schéma PID ovládača
Pre vytvorenie bloku pre ovládač je potrebné definovať vstupy. Tieto zahŕňajú požadované parametre letu UAV, teda požadovanú výšku, požadovanú rýchlosť sklonu a náklonu a požadované zrýchlenie pri zatáčaní. Zvyšných 6 parametrov tvoria zrýchlenia v osiach X, Y a Z, a rýchlosti sklonu, náklonu a zatáčania. Výstupom sú rýchlosti otáčok jednotlivých motorov pre dosiahnutie požadovaných parametrov. Ako spätná väzba sú použité údaje zo senzorov z bloku IMU.
3 Výsledky
Výsledky je možné sformulovať do 3 základných kategórií: Grafické znázornenie výsledkov, výsledky vo forme dát a 3D vizualizácia.
V grafickej forme je možné evaluovať na základe požadovaných vlastností porovnaných s týmto simulovanými. Na základe získaných údajov podľa Obrázok 8 sú získané údaje porovnateľné s tými požadovanými. Odchýlky, ktoré vznikli sú na základe reálnej práce kvadrokoptéry, ktorá v prípade vertikálneho letu, musí najprv vzlietnuť. Otočený súradnicový v osi Z spôsobuje, že údaje majú negatívny smer.
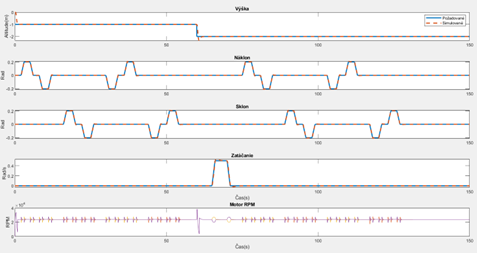
Zdroj: Vlastné spracovanie
Obrázok 8 Grafické znázornenie letu UAV
Pre jednotlivé sekcie je možné porovnávať hodnoty detailnejšie, vyobrazené na Obrázok 9 a Obrázok 10.
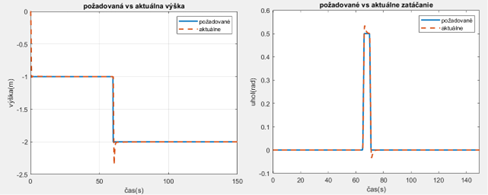
Zdroj: Vlastné spracovanie
Obrázok 9 Porovnávanie veličín výšky a zatáčania
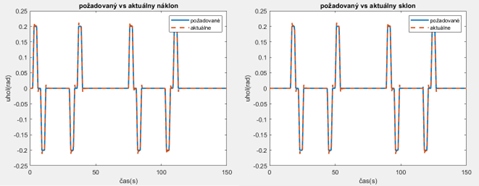
Zdroj: Vlastné spracovanie
Obrázok 10 Porovnávanie veličín náklonu a sklonu
Pripojeným rozšírenia Unreal Engine je zosimulovaný let UAV vo vytvorenom virtuálnom prostredí. Takto znázornený let umožňuje prehľadným spôsobom sledovať priebeh operácie UAV. Názorná ukážka je zobrazená na Obrázok 11.
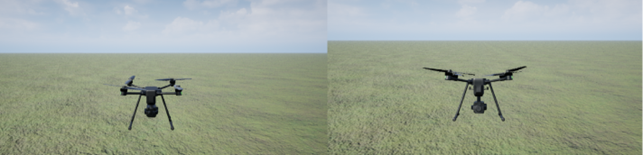
Zdroj: Vlastné spracovanie
Obrázok 11 3D simulácia letu UAV
4 Záver
Vytvorenie modelu kvadrokoptéry spoločne s inerciálnou meracou jednotkou a ovládačom je komplexná úloha. Existuje množstvo spôsobov ako vytvoriť takýto model, ktorý môže zahŕňať iba základné komponenty až po veľmi členité modely. Opísaný model definuje zakomponovanie pohybových rovníc do sústavy modelu podľa tvaru kvadrokoptéry relatívne voči doprednému pohybu. V simulačnom programe figurujú aj zložitejšie súčasti ako odpor vzduchu, koeficient vztlaku, hmotnosť samotného zariadenia a ďalšie charakteristiky vytvárajúce členitejší systém.
Výstupom virtuálneho prostredia je program, umožňujúci modifikovanie modelu UAV a vonkajších podmienok, za účelom získavania množstva dát, ktoré môžu byť spracované vo forme tabuľky, grafov alebo 3D simulácie. Akékoľvek veličiny vystupujúce z ktorejkoľvek časti blokových schém môžu byť vyvedené na výstup a analyzované. Môže tiež dochádzať k zmiešavaniu signálov pre ich porovnávanie, či k matematickým operáciám, ktoré dokážu vyvodiť nové údaje o nových veličinách. Medzi základné výstupy patrí: napätie, prúd, stav batérie, RPM, rýchlosť, zrýchlenie a poloha v osiach X, Y a Z, rýchlosť, zrýchlenie a poloha okolo osí X, Y a Z a ich hodnoty v rôznych sekciách spracovania a zadané veličiny o požadovanom lete.
Takto vytvorený model virtuálneho prostredia umožňuje vytvárať ľubovoľné lietajúce prostriedky, simulovať ich prevádzku a na základe získaných výstupov vyhodnocovať vytvorené zariadenia bez potreby reálnych experimentálnych letov. Metóda simulácie šetrí finančné náklady spojené s kúpou a prevádzkou UAVs.
5 Literatúra
- TRAJKOVSKIi, K.K. – GRIGILLO, D. – PETROVIČ, D. Optimization of UAV Flight Missions in Steep Terrain. In Remote Sensing. 12. vydanie. 2020. DOI = 10.3390/rs12081293
- NAIDOO, Y. – STOPFORTH, R. – BRIGHT, G. Development of an UAV for search & rescue applications. IEEE Africon ´11. 2011. DOI: 10.1109/AFRCON.2011.6072032
- KONERT, A. – BALCERZAK, T. Military autonomous drones (UAVs) – from fantasy to reality. Legal and Ethical implcations. In Transportation Research Procedia, vyd.: 59. 2021. https://doi.org/10.1016/j.trpro.2021.11.121
- VICKI, P. M. Military UAVs claiming the skies with fuel cell power. In Fuel Cells Bulletin. Volume 2007. Issue 12. 2007. Pages: 12-15. https://doi.org/10.1016/S1464-2859(07)70438-8
- TAHIR et. al. Swarms of Unmanned Aerial Vehicles – A Survey. In Journal of Industrial Information Integration. 2019. Vyd.: 16. DOI: 10.1016/j.jii.2019.100106
- Hentati et.al. Simulation Tools, Environments and Frameworks for UAV Systems Performance Analysis. In Journal2018. DOI: 10.1109/IWCMC.2018.8450505
- FERRY, N. Quadcopter Pland Model and Control System Development With MATLAB/Simulink Implementation: Research Paper. Rochester: Rochester Institute of technology. 2017.
- BAGHERI, S. Modeling, Simulation and Control System Design for Civil Unmanned Aerial Vehicle (UAV): Master Thesis. Umea University. 2014.
- NOVÁK, A. – SEDLÁČKOVÁ, A. – PECHO, P. Detection and prediction of a pair of unmanned Aircraft contact. In Promet – Traffic&Transportation. Volume:34. 2022. DOI: 10.7307/ptt.v34i3.4078
- NOVÁK, A. et.al. Use of Unmanned Aerial Vehicles in Aircraft Inspection. In Advances in Science, Technology and Engineering Systems Journal. Vyd.:6. 2021. 10.25046/aj060321
- KOVÁČIKOVÁ, K. – KANDERA, B. – KOVÁČIKOVÁ, M. Výcvik pilotov bezpilotných prostriedkov. In AeroJournal. Ročník 19.; číslo 1/2022. https://doi.org/10.26552/aer.C.2022.1.2
Poďakovanie
Predložený článok je výstupom projektu Ministerstva školstva, vedy, výskumu a športu Slovenskej republiky KEGA 040ŽU-4/2022 Transfer progresívnych metód vzdelávania do študijného programu “Technológia údržby lietadiel” a “Letecká doprava”.
Autori:
Patrik VEĽKÝ 1, Pavol PECHO 2, Michal HRÚZ3
Tituly a pôsobisko autorov:
1 Ing. Patrik Veľký, Žilinská univerzita v Žiline, Katedra leteckej dopravy, Univerzitná 8215/1, 01026, Žilina, Slovensko, E-mail: patrik.velky98@gmail.com
2 Ing. Pavol Pecho, PhD., Žilinská univerzita v Žiline, Katedra leteckej dopravy, Univerzitná 8215/1, 01026, Žilina, Slovensko, E-mail: pavol.pecho@fpedas.uniza.sk
3 Ing. Michal Hrúz, Žilinská univerzita v Žiline, Katedra leteckej dopravy, Univerzitná 8215/1, 01026, Žilina, Slovensko, E-mail: michal.hruz@stud.uniza.sk
