Vietor je najlacnejší, najvýkonnejší a najekologickejší zdroj energie na otvorenom mori. Jeho využitie siaha do dávnej minulosti, kedy predstavoval jeden z hlavných propulzných systémov v námornej plavbe.
Padákový (kite) propulzný systém predstavuje doplnkovú formu pohonu námorných nákladných a obchodných lodí. Využíva silu vetra na pohyb plavidla po vodnej ceste prostredníctvom padákovej plachty. Ide o inovatívny druh pohonu, ktorého cieľom je zníženie spotreby paliva a eliminácia emisií vznikajúcich pri bežných propulzných systémoch využívaných vo výtlačnej plavbe. Padákový propulzný systém je možné využiť na nových ale aj existujúcich plavidlách.
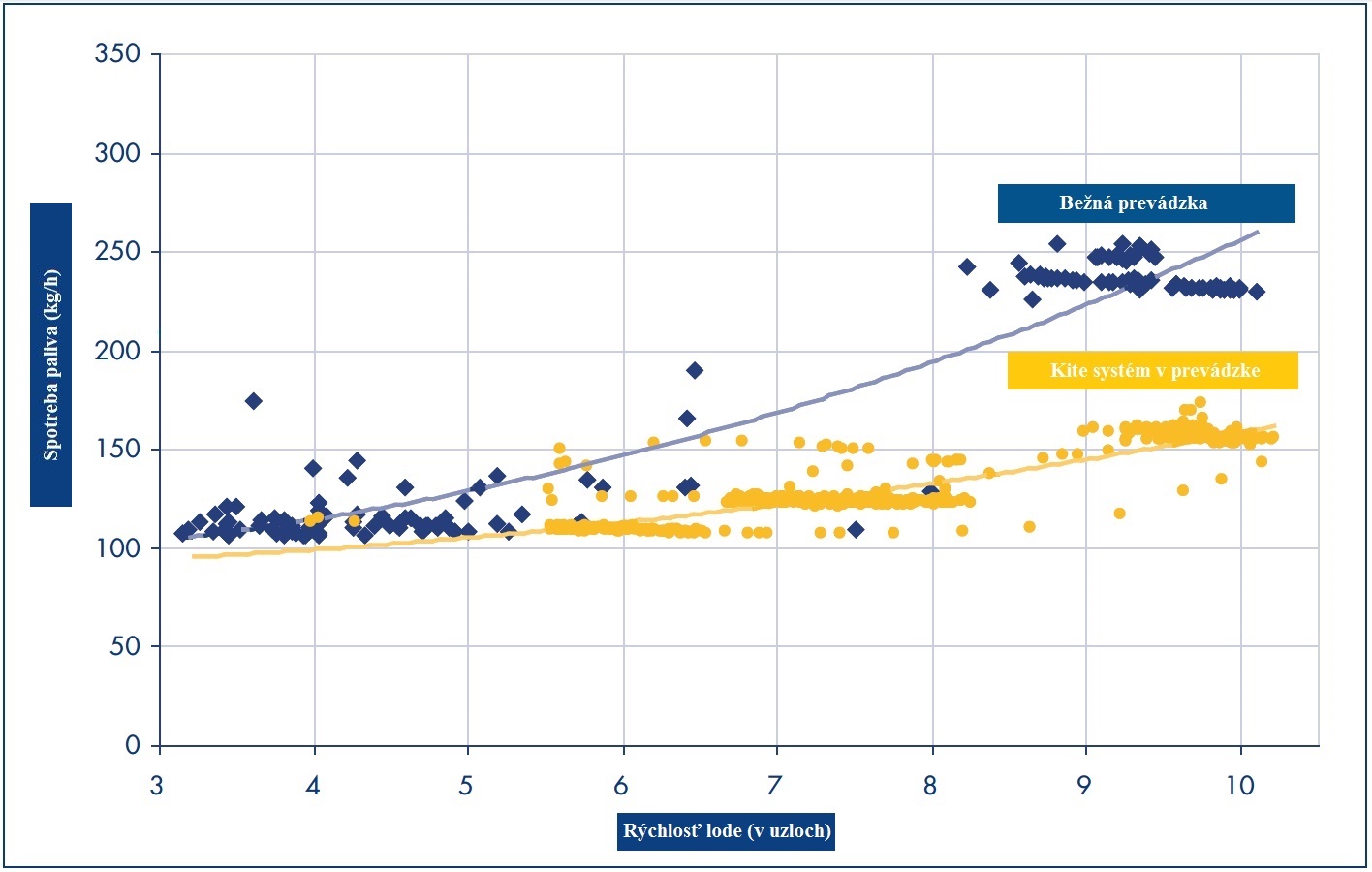
Obrázok 1 Porovnanie spotreby bez/s využitím doplnkového padákového propulzného systému Zdroj: SkySails, úprava autor
Princíp činnosti propulzného systému
Princíp pohonu je založený na využití vlečného padáku ako doplnkového pohonu k bežnému či už naftovému, parnému alebo inému propulznému systému plavidla. Technológia pohonu pomocou padákovej plachty umožňuje variabilne meniť jeho letovú výšku (od cca 100 – 300 metrov), čím umožňuje využiť efektívne vietor, ktorého sila zvyčajne s nadmorskou výškou vzrastá.

Obrázok 2 Inštalácia doplnkového propulzného systému na plavidle Zdroj: http://www.energyglobe.info/en/energy-globe-award/press-room/press-photos/recent-photos/nominees-energy-globe-world-award-prague-09/
Padákový pohonný systém funguje na princípe dynamického ťahu padáka, ktorý vytvára 25 násobne väčšiu ťahovú silu na meter štvorcový ako bežné oplachtenie. Pri dobrých veterných podmienkach to predstavuje viac ako 2 000 kW propulznej sily. Generovanie 1 kWh pomocou padákového systému stojí len cca 6 USD centov, alebo menej ako polovica ceny na generovanie 1 kWh hlavným motorom.

Obrázok 3 Padáková plachta (Kite)
Zdroj: SkySails
Úsporou paliva dochádza analogicky aj k znižovaniu emisií. Systém umožňuje znížiť emisie CO2, síry a oxidov dusíka. Medzinárodná námorná organizácia (IMO) odhaduje, že použitie doplnkového padákového propulzného systému môže znížiť škodlivé emisie uhlíka až o cca 100 miliónov ton za rok.
Inovatívna technológia
Špeciálna padáková plachta (Towing Kite) je základom propulzného systému. Spoločne s kontrolným modulom a ťažným lanom tvoria tzv. „letový modul“. Letový modul je ovládaný z kontrolného modulu. Padáková plachta vykonáva pravidelné dynamické letové manévre v oblasti pred provou lode, ktoré generujú prídavný pohon plavidla.
Obrázok 4 Trajektória pohybu padákovej plachty
Zdroj: SkySails
Táto ťažná sila sa prenáša na loď cez ťažné lano vyrobené z vysoko pevného syntetického vlákna. Špecializovaný kábel integrovaný do tohto lana zaisťuje dodávku energie do kontrolného modulu a zabezpečuje komunikáciu medzi letovým modulom a riadiacim systémom na mostíku lode.

Obrázok 5 Ťažné lano
Zdroj: SkySails
Spustenie, obsluha a opakované obnovenie pohonného systému, ako aj ovládanie kontrolného modulu je riadené z riadiaceho centra na lodi. Komponenty celého systému sú navrhnuté v súlade s požiadavkami klasifikačných spoločností.

Obrázok 6 Letový modul
Zdroj: SkySails
Všetky palubné komponenty ako aj letový modul sú umiestnené na prove lode tak, aby nedochádzalo k zníženiu nákladových priestorov lodí. Celý systém je navrhnutý tak, aby nenarušoval plynulý chod plavby, t. j. aby nebola narušená plavebná priechodnosť predovšetkým pod mostami a v prístavoch, ale aj aby nepredstavoval prekážky pri nakládke resp. vykládke lode.
Bezpečnosť a obsluha
Systém je ovládaný pomocou ovládacieho panelu inštalovaného na mostíku lode. Spustenie a prevádzka systému je poloautomatická a teda vyžaduje len niekoľko jednoduchých úkonov člena lodnej posádky na prove lode potrebných k jeho uvedeniu do prevádzky. Systém pozostáva z teleskopického stožiaru pevne ukotveného na prove lode, skladovacieho priestoru padáku, navijaku ťažného lana a ostatných zariadení. Teleskopický stožiar sa vysúva spolu s padákovou plachtou ukotvenou pomocou pohyblivého lanovia cez kladku v záhlaví stožiaru. V procese uvedenia systému do prevádzky sa teleskopický stožiar dvíha vertikálne pod malým uhlom náklonu v závislosti od smeru a sily vetra až na požadovanú úroveň. Vysunutím teleskopického stožiara dôjde k rozvinutiu padákovej plachty do letovej veľkosti a tým k uvedeniu prídavného propulzného systému do pohotovostného režimu. Uvoľnením brzdy navijaku ťažného lana dôjde k samočinnému vypusteniu padákovej plachty do vzduchu a uvedeniu systému do prevádzky. Padáková plachta je riadená automaticky po uvedení do letového módu. Autopilot z kontrolného modulu zaisťuje definovanie predpísaných letových manévrov padáku v závislosti od smeru a rýchlosti vetra, ale aj rýchlosti samotnej lode tak, aby systém prinášal optimálny doplnkový pohon. V závislosti od smeru a rýchlosti vetra je možné hydraulicky nastaviť polohu a smer vodítok ťažného lana a tým optimalizovať jeho ťahovú silu. Všetky informácie z kontrolného modulu sú odosielané do riadiaceho centra na kapitánskom mostíku, kde umožňujú posádke pracovať s aktuálnymi údajmi o prevádzke letového systému a tým operatívne meniť a prispôsobovať jeho činnosť.

Obrázok 7 Výsuvný sťažeň padákovej plachty
Zdroj: SkySails
Deaktivácia systému je realizovaná v opačnom poradí ako jeho aktivácia. Navijak navinie ťažné lano až na úroveň teleskopického stožiara, ktorý sa následne zasunie do jeho východzej polohy. Padáková plachta sa následne uloží do úložného priestoru. Celý proces spustenia trvá asi 15 minút. Prevádzku a obsluhu systému zabezpečí štandardný počet členov lodnej posádky t. j. nie je potrebný dodatočný personál k jeho obsluhe.
Autor
Ing. Martin Jurkovič, PhD., Žilinská univerzita v Žiline, Fakulta prevádzky a ekonomiky dopravy a spojov, Katedra vodnej dopravy, Univerzitná 8215/1, 010 26 Žilina, Slovenská republika
Literatúra
KALINA, T., PIALA, P.: Emission limits of inland waterway vessel engines in accordance with EU legislation. In: Eksploatacja i Niezawodność = Maintenance and reliability. – ISSN 1507-2711. – Nr. 3 (2007), p. 96-97.
Tento príspevok vznikol s podporou projektu „Dobudovanie prototypu simulátora lodnej prevádzky“ (ITMS: 26220220007) v rámci OP Výskum a vývoj spolufinancovaný zo zdrojov Európskeho fondu regionálneho rozvoja.

