Abstrakt: Predložený článok prezentuje výsledky experimentálnych nárazových skúšok s figurínami zraniteľných účastníkov cestnej premávky. Zmena rýchlosti vozidla v rámci dopravných nehôd s takýmito účastníkmi cestnej premávky predstavuje jeden z dôležitých parametrov rekonštrukcie a analýzy týchto nehôd. Prostredníctvom vyhodnotenia objektívne nameraných hodnôt rýchlostí vozidiel bola určená reálna hodnota zmeny rýchlosti vozidla. Tieto hodnoty boli následne porovnané s teoretickými hodnotami určenými prostredníctvom používaných znaleckých postupov. Výskum indikuje odchýlky reálnych hodnôt zmeny rýchlosti vozidla od teoretických hodnôt.
Kľúčové slová: súdne inžinierstvo, nárazová skúška, delta v, chodec, dopravná nehoda
JEL: L62
CAR SPEED CHANGE DUE IMPACT TO VULNERABLE ROAD USER
Abstract: This paper presents the results of experimental crash tests with dummies of vulnerable road users. The change of vehicle speed in accidents with such road users represents one of the important parameters for the reconstruction and analysis of these accidents. Through the evaluation of objectively measured values of vehicle speeds, the real value of the change in vehicle speed was determined. These values were then compared with the theoretical values determined through the expert procedures used. The research indicates deviations of the real values of vehicle speed change from the theoretical values.
Keywords: forensic engineering, crash test, delta v, pedestrian, traffic accident
1 Úvod
V rámci forenznej rekonštrukcie dopravnej nehody s chodcom je vždy nutné zohľadniť vplyv nárazu cestného vozidla do tela chodca na zmenu rýchlosti vozidla z dôvodu tohto nárazu. Jednou z metód vyjadrenia vzťahu medzi nárazovou rýchlosťou do chodca a rýchlosťou vozidla tesne po náraze je použitie zákona zachovania hybnosti [1]:

kde:
- vn – nárazová rýchlost vozidla do tela chodca (m/s)
- v1 – rýchlosť vozidla tesne po náraze s chodcom (m/s)
- vch – rýchlosť chodca pred zrážkou (m/s)
- mv – hmotnosť vozidla (kg)
- mch – hmotnosť chodca (kg)
- α – uhol medzi vektormi rýchlostí vozidla a chodca (°)
Zmenu rýchlosti vozidla z dôvodu nárazu do chodca je potom možné následne vyjadriť:

Správne určenie zmeny rýchlosti vozidla z dôvodu nárazu potom následne umožňuje v ďalších krokoch analýzy správne určenie rýchlosti vozidla na počiatku nehodového deja.
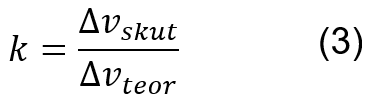
Vyššie uvedený kinematický výpočet predstavuje idealizáciu komplexnej silovej interakcie medzi telom chodca a vozidlom, pričom skutočná zmena rýchlosti vozidla závisí od viacerých faktorov: prekrytia vozidla a tela chodca, tvaru prednej časti vozidla, výšky chodca a nárazovej rýchlosti vozidla a z toho vyplývajúcej po nárazovej kinematiky tela chodca. Z tohto dôvodu je v praxi zmena rýchlosti vozidla korigovaná korekčným koeficientom k, ktorý vyjadruje pomer skutočnej zmeny rýchlosti vozidla a teoretickej zmeny rýchlosti vozidla [2]:
Určenie korekčného koeficientu bolo vykonané v [1] pre osobný automobil s trapézovým tvarom karosérie simulačným spôsobom v programe PC-Crash s využitím základného viactelesového modelu ľudského tela v polohe chodca, pričom tento spôsob môže byť obmedzený limitmi použitých simulačných modelov.
Rovnako doposiaľ nebolo preskúmané určenie zmeny rýchlosti vozidla do kolobežkára. Je však predpoklad, že napriek tomu, že sa jedná o vodiča jednostopého vozidla, charakter vzájomnej silovej interakcie medzi vozidlom a kolobežkárom sa bude blížiť skôr charakteru nárazu do chodca ako charakteru nárazu do cyklistu a to z dôvodu celkového postoja tela kolobežkára pri jazde.
Cieľom predkladaného príspevku je preskúmanie skutočnej zmeny rýchlosti osobného automobilu pri náraze do figuríny zraniteľného účastníka cestnej premávky experimentálnym spôsobom prostredníctvom nárazových skúšok.
2 Metodika a použité prístroje
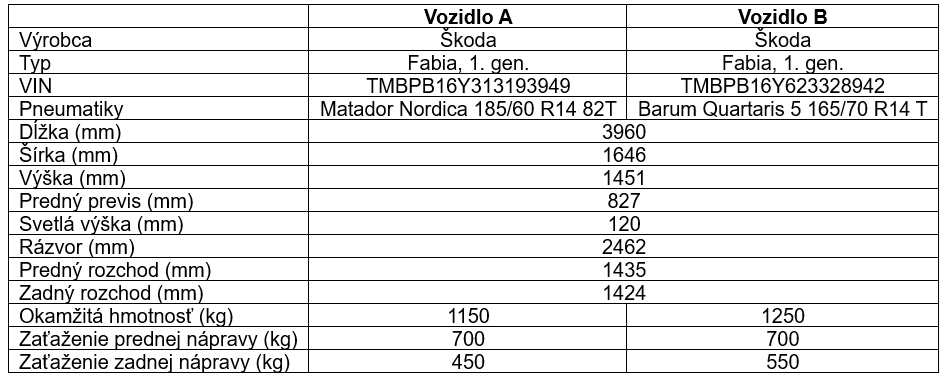
Ako testovacie vozidlá boli použité osobné automobily Škoda Fabia, 1. gen (Obrázok 1). Základné údaje o vozidlách sú uvedené v tabuľke 1. Vozidlá boli pri skúškach obsadené vodičom a meracou a záznamovou technikou, ich okamžitá hmotnosť bola získaná vážením (nájazdové váhy Haenni WL108).


Zdroj: Autori
Obr. 1 Testovacie vozidlá Škoda Fabia ; vľavo – vozidlo A, vpravo – vozidlo B
Tabuľka 1: Základné údaje o testovacích vozidlách
Zdroj:Autori
Dynamické parametre vozidiel pri nárazových skúškach boli merané prostredníctvom primárneho meracieho systému a sekundárnych meracích zariadení.
Primárny merací systém pozostával z CAN bus dátového záznamíka CANedge3 (CSS Electronics), CAN bus modulu CANmod.input (CSS Electronics) a z meracej jednotky xProGPS_nano25 (Suchy Data Systems, GmBH). Časový priebeh rýchlosti vozidiel počas testov bol získaný prostredníctvom meracej jednotky xProGPS_nano25 s využitím senzorickej fúzie údajov z GNSS senzora (obnovovacia frekvencia 25 Hz), trojosého akcelerometra s nastaveným meracím rozsahom ±16 g (vzorkovacia frekvencia 100 Hz) a trojosého gyroskopu s nastaveným meracím rozsahom ±250 °/s (vzorkovacia frekvencia 100 Hz). Tieto dáta boli uložené do dátového záznamníka CANedge3. Detekcia okamihu prvého nárazu vozidla do skúšobnej figuríny bola zabezpečená prostredníctvom tenzometrického páskového spínača Ribbon Switch 131-A (Tapeswitch) zapojeného ako digitálny vstup CAN bus modulu CANmod.input, ktorý slúžil ako prevodník digitálnych údajov na CAN dáta, ktoré boli následne uložené v záznamníku CANedge3. Tenzometrický páskovy spínač bol zároveň zapojený aj do na to určeného synchronizačného zariadenia, ktoré následne pri náraze uviedlo do činnosti 4 LED svetelné zdroje (3 umiestnené na exteriéry vozidla, 1 umiestnená v interiéry vozidla) a ktoré sa nachádzali v zornom poli kamier snímajúcich predmetné testy. Týmto spôsobom bolo možné časovo synchronizovane merať údaje o dynamických parametroch vozidla počas nárazu (napr. nárazová rýchlosť a ponárazová rýchlosť vozidla s frekvenciou 100 Hz určená ako výstup senzorickej fúzie), určiť okamih nárazu do skúšobnej figuríny a vyhotoviť video záznamy (pre identifikáciu okamihu nárazu a konca fázy hlavnej silovej interakcie) . Primárny merací systém bol umiestnený nad stredovým tunelom medzi sedadlami vodiča a spolujazdca na kovovej platforme pevne spojenej s vozidlom (Obrázok 2). GNSS anténa systému bola upevnená magneticky na streche vozidla.

Zdroj: Autori
Obr. 2 Primárny merací systém v testovacom vozidle
Sekundárne meracie zariadenia pozostávali zo svetelnej závory Minitimer HL440 (Tag Heuer), ktorá slúžila na verifikáciu prednárazovej rýchlosti vozidla cca 2 m pred nárazom a merací prístroj PicDAQ5 (DSD), ktorý slúžil na meranie spomalenia vozidiel s vysokou vzorkovacou frekvenciou 2 kHz pre dodatočnú analýzu špecifík predmetných testov (táto analýza nie je predmetom tohto príspevku). Testy boli dokumentované videotechnikou, fototechnikou a 3D snímkovacími metódami.
Metodika testov spočívala v uvedení vozidla vodičom do pohybu vlastným pohonom na rýchlosť cca 60 km/h, stlačení spojkového pedálu tesne pred nárazom a následného nárazu do skúšobnej figuríny pri stlačenom pedáli spojky a bez brzdenia prevádzkovou brzdou. K začiatku brzdenia vozidla došlo vždy až po skončení kontaktnej fázy testu, t.j. po strate fyzického kontaktu medzi figurínou, kolobežkou a vozidlom. Takýmto spôsobom bolo zabezpečené, že vozidlo bolo počas nárazu nebrzdené, a nebolo spomaľované ani brzdením motorom, ale k zmene rýchlosti vozidla došlo najmä z dôsledku nárazu a vo veľmi malej miere valivým odporom kolies vozidla (pneumatiky boli nahustené na tlak predpísaný výrobcom vozidla) a v zanedbateľnej miere odporom vzduchu.
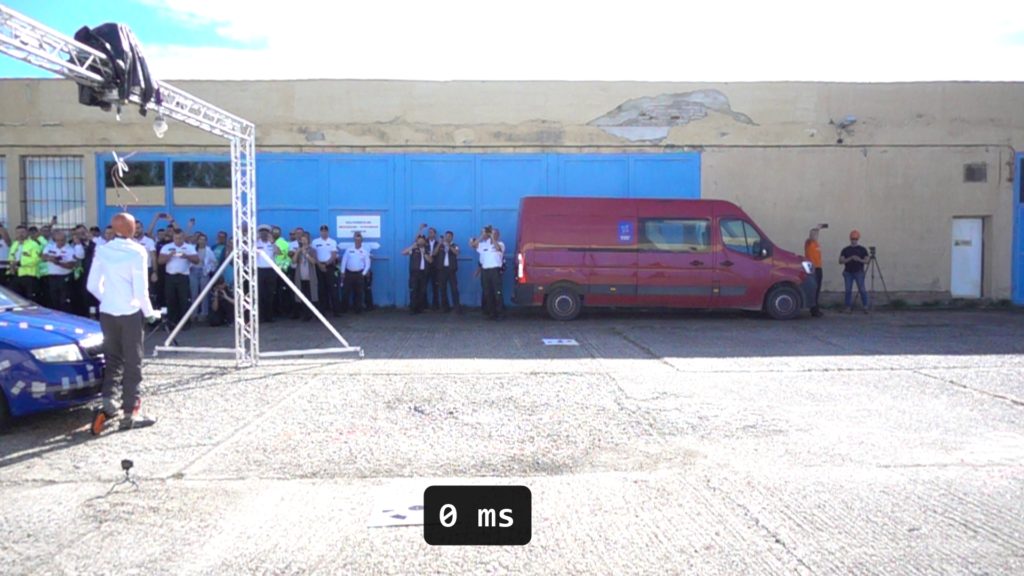
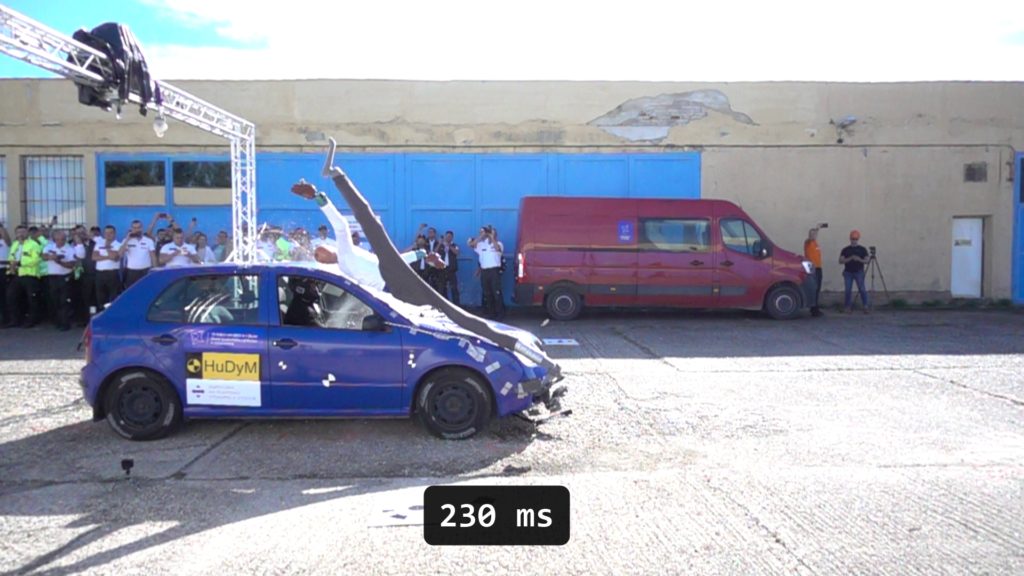
Pri teste 1 (Obrázok 3 vľavo) bol simulovaný náraz vozidla do chodca tlačiaceho kolobežku – vozidlo A narazilo svoju pravou prednou časťou s plným prekrytím do figuríny chodca (1,75 m; 78 kg) s kolobežkou umiestnenou napravo od figuríny. Pri teste 2 (Obrázok 3 vpravo) bol simulovaný náraz do kolobežkára – vozidlo B narazilo svoju pravou prednou časťou s plným prekrytím do figuríny kolobežkára (1,70 m; 60 kg), t.j. do figuríny stojacej ľavým chodidlom na platforme kolobežky. Pri testoch boli použité 2 kusy rovnakých typov kolobežky (Nils Extreme HM0106) s hmotnosťou 3,8 kg. Skúšobné figuríny boli tesne pred testom uvoľnené z pomocného rámu tak aby pri náraze spočívala hmotnosť figuríny na jej chodidlách.


Zdroj: Autori
Obr. 3 Vzájomná poloha vozidlo/figurína: vľavo – test 1, vpravo – test 2
3 Výsledky
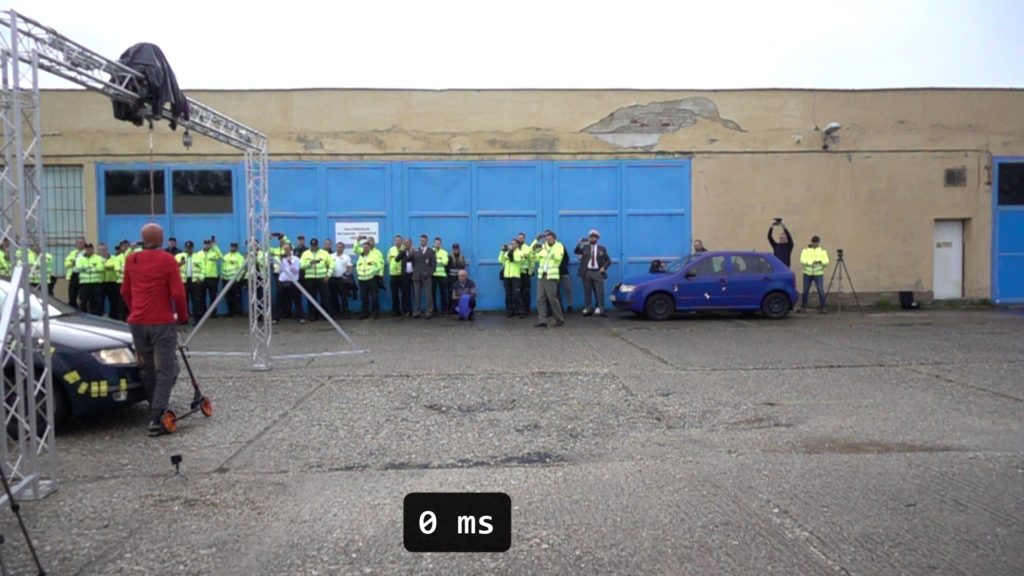
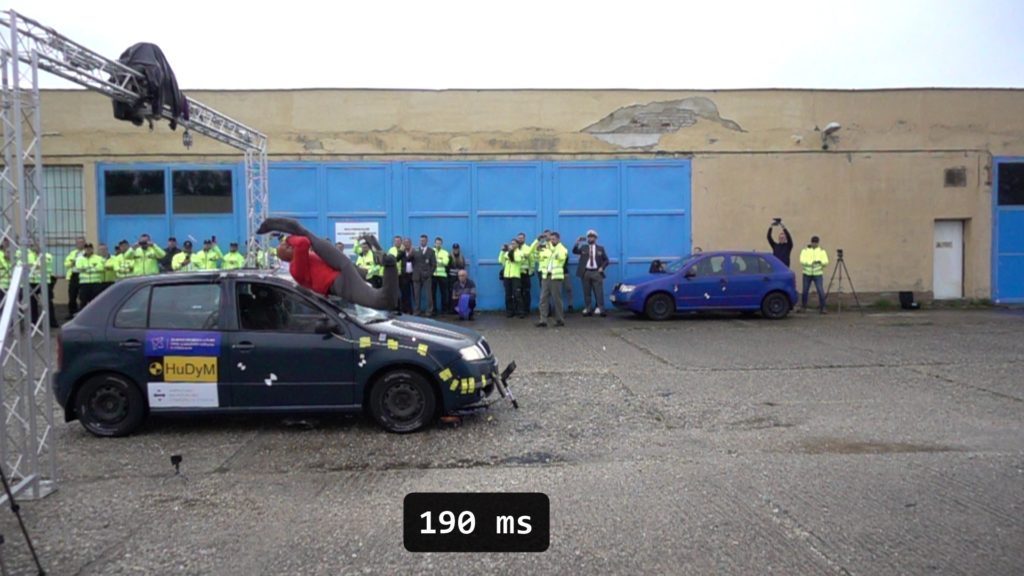
Na obrázku 4 sú znázornené polohy vozidiel a skúšobných figurín v rámci testu 1 v okamihu nárazu (vľavo) a po ukončení fázy hlavnej silovej interakcie medzi vozidlom a figurínou (vpravo). Fáza hlavnej silovej interakcie trvala v rámci testu 1 cca 0,19 s.
Na obrázku 5 sú znázornené polohy vozidiel a skúšobných figurín v rámci testu 2 v okamihu nárazu (vľavo) a po ukončení fázy hlavnej silovej interakcie medzi vozidlom a figurínou (vpravo). Fáza hlavnej silovej interakcie trvala v rámci testu 2 cca 0,23 s.
Zdroj: Autori
Obr. 4 Test 1: vľavo – okamih nárazu, vpravo – koniec hlavnej silovej interakcie
Zdroj: Autori
Obr. 5 Test 2: vľavo – okamih nárazu, vpravo – koniec hlavnej silovej interakcie
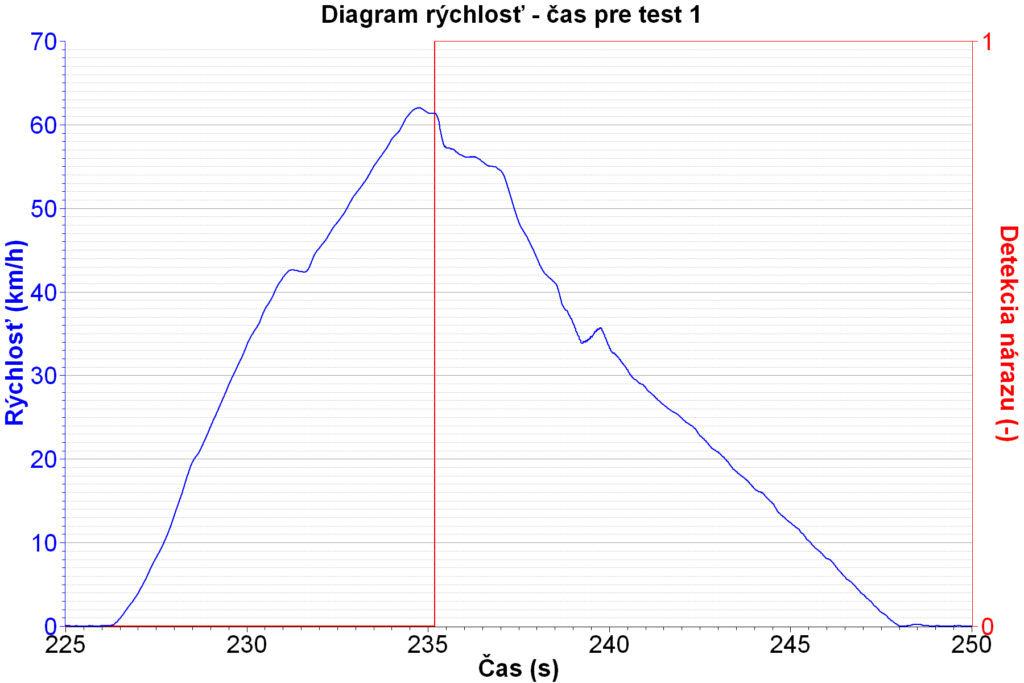
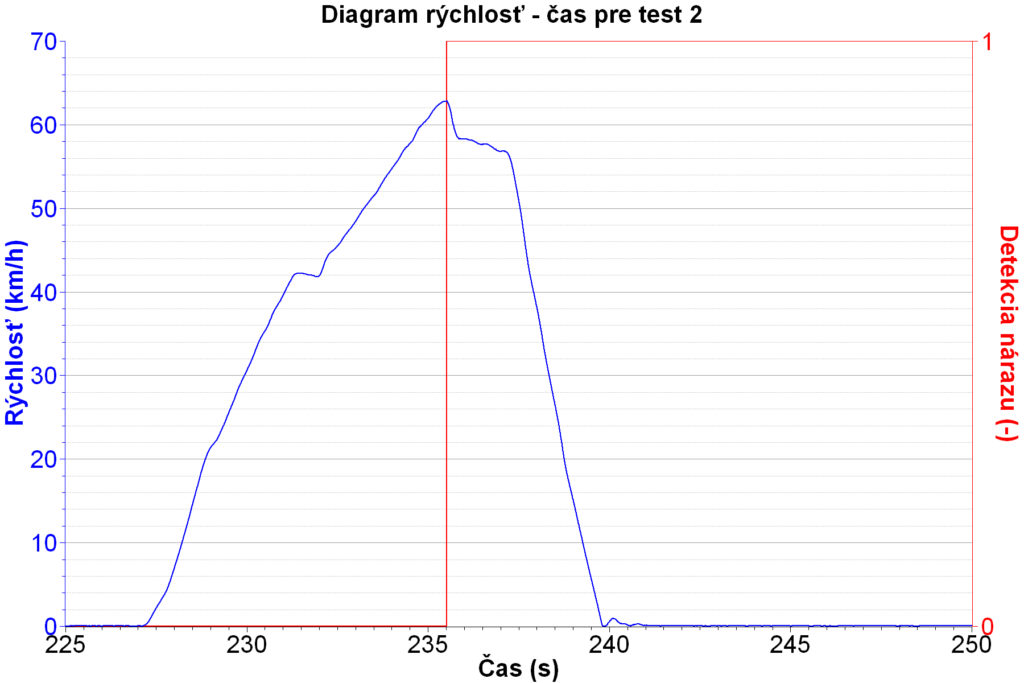
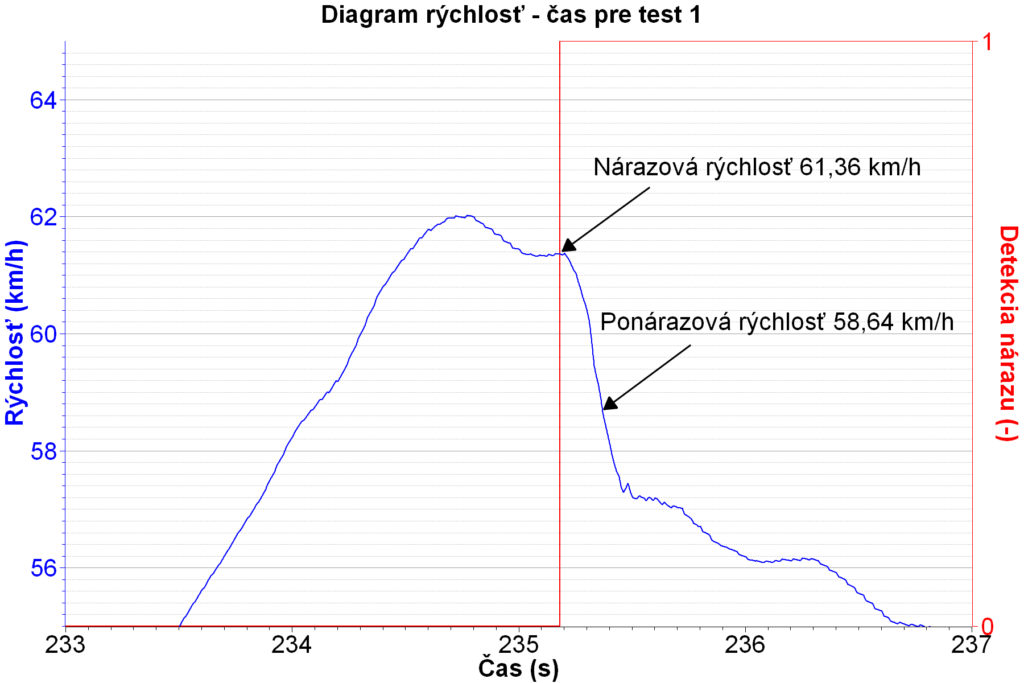
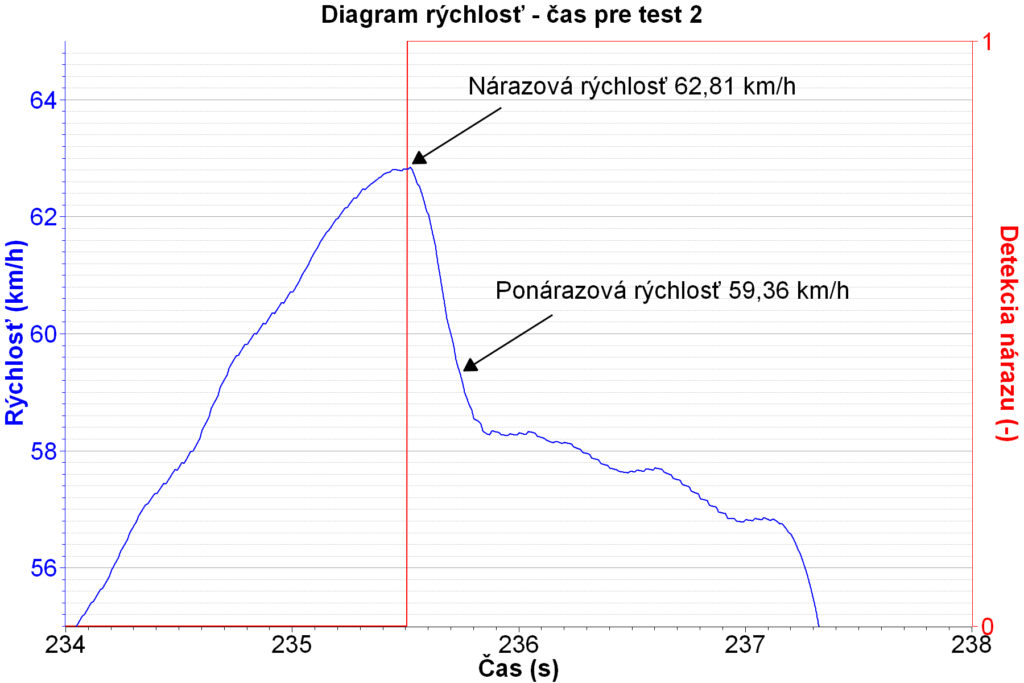
Na obrázku 6 sú znázornené časové priebehy rýchlosti testovacích vozidiel rámci testu 1 (vľavo) a v rámci testu 2 (vpravo). Na obrázku 7 sú znázornené detaily časových priebehov rýchlostí testovacích vozidiel v rámci testu 1 (vľavo) a v rámci testu 2 (vpravo).
Nárazová rýchlosť vozidla A pri teste 1 bola 61,36 km/h a rýchlosť tohto vozidla po ukončení hlavnej kontaktnej fázy bola 58,64 km/h. Zmena rýchlosti vozidla A pri teste 1 bola teda 2,72 km/h.
Nárazová rýchlosť vozidla B pri teste 2 bola 62,81 km/h a rýchlosť tohto vozidla po ukončení hlavnej kontaktnej fázy bola 59,36 km/h. Zmena rýchlosti vozidla A pri teste 2 bola teda 3,45 km/h.
Zdroj: Autori
Obr. 6 Časový priebeh rýchlosti: vľavo – test 1, vpravo – test 2
Zdroj: Autori
Obr. 7 Detail časového priebehu rýchlosti: vľavo – test 1, vpravo – test 2
4 Diskusia a záver
Teoretická zmena rýchlosti vozidla získaná výpočtom zo vzťahov (1) a (2) je pre test 1 pre danú nárazovú rýchlosť 61,36 km/h cca 4,07 km/h. Vzhľadom na hodnotu skutočnej zmeny rýchlosti vozidla 2,72 km/h je potom korekčný koeficient 0,668.
Teoretická zmena rýchlosti vozidla získaná výpočtom zo vzťahov (1) a (2) je pre test 2 pre danú nárazovú rýchlosť 62,81 km/h cca 3,05 km/h. Vzhľadom na hodnotu skutočnej zmeny rýchlosti vozidla 3,45 km/h je potom korekčný koeficient 1,131.
Autori v [2] na základe simulačných výpočtov v programe PC-Crash uvádzajú, že korekčný koeficient pre trapézový tvar karosérie vozidla a náraz do tela stojaceho chodca s plným prekrytím rýchlosťou vyššou ako 40 km/h nadobúda hodnotu v priemere cca 0,815, pričom pre úroveň nárazovej rýchlosti 60 km/h sa pre ich zvolené okrajové podmienky výpočtu pohyboval korekčných koeficient v hodnotách 0,745 – 0,826.
Z vykonaných testov vyplýva, že ani v jednom prípade nebola skutočná zmena rýchlosti vozidla totožná s vypočítanou teoretickou zmenou rýchlosti. Rovnako z testov vyplýva, že v oboch prípadoch nebola skutočná experimentálne zistená zmena rýchlosti na úrovni hodnôt určených prostredníctvom simulačného výpočtu.
V prípade oboch testov je možné pozorovať nasledovné technické dôvody, u ktorých je predpoklad, že spôsobili rozdielnu hodnotu zmeny rýchlosti vozidla v porovnaní s očakávanou (teoretickou, resp. simulačne určenou) hodnotou:
- Napriek tomu, že v rámci testu 1 v okamihu prvého kontaktu sa pôvodne figurína chodca nachádzala v plnom prekrytí s prednou časťou vozidla, tak počas nárazu došlo k čiastočnému poklzu jej pravej dolnej končatiny po pravom prednom blatníku vozidla z dôvodu zaoblenia pravého predného rohu vozidla. Z videoanalýzy testu 1 ďalej vyplýva, že náraz vozidla do figuríny spôsobil viac priestorovú rotáciu tela figuríny nad strechu vozidla a mierne doprava ako odhodenie smerom dopredu. Rovnako z videoanalýzy vyplýva, že nedošlo k zachyteniu dolných končatín figuríny medzi vozidlo a kolobežku (čo by malo tendenciu spôsobiť „zaháknutie“ dolných končatín figuríny pod prednú časť vozidla). Je teda zrejmé, že náraz nespôsobil ideálne „odovzdanie“ kinetickej energie figuríne v doprednom smere, a teda vzájomná silová interakcia medzi vozidlom a figurínou bola redukovaná, čo spôsobilo aj menšiu zmenu rýchlosti vozidla v porovnaní s ideálnym prípadom.
- V rámci testu 2 bol náraz do figuríny s plným prekrytím, bez tendencie poklzu dolných končatín figuríny po pravom prednom blatníku vozidla. Ďalej bolo možné pozorovať mierne zachytenie dolných končatín figuríny pod prednú časť vozidla a následne rázový kontakt bez klzu medzi plecami figuríny a rozhraním prednej hrany strechy vozidla a čelného skla. Tento fakt je možné pozorovať na deformácie tejto časti vozidla. Z týchto dôvodov došlo k ideálne prenosu rázovej energie na telo figuríny a jej doprednému odhodeniu. Silová interakcia medzi vozidlom a figurínou teda nebola výrazne redukovaná. Zároveň je možné pozorovať určité „spriečenie sa“ kolobežky pod prednou časťou vozidla, čo mohlo spôsobiť dodatočný spomaľovací efekt na vozidlo. Z vyššie uvedených dôvodov zmena rýchlosti vozidla o niečo vyššia ako teoretická hodnota.
Charakter deformácie oboch vozidiel ako dôsledku vzájomnej silovej interakcie s figurínou a kolobežkou v rámci nárazu je možné pozorovať na obrázku 8.


Zdroj: Autori
Obr. 8 Deformácia vozidiel po náraze: vľavo – test 1, vpravo – test 2
Z vykonaných experimentálnych testov vyplýva pre rekonštrukciu a analýzu dopravných nehôd, že teoretické analytické a simulačné postupy je nutné verifikovať cez údaje získané skúškami v reálnom svete a v reálnych podmienkach. Dopravné nehody predstavujú množinu podmienených dejov v cestnej doprave v rámci ktorých je možné pozorovať technicky relevantný vplyv špecifík a detailov daných dopravných nehôd. Nezohľadnenie týchto špecifík môže vniesť do analýzy dopravnej nehody nedostatky, ktoré sa následne prenesú do ďalších krokov technického posúdenia danej dopravnej nehody.
5 Literatúra
- KASANICKÝ, G. Súčasné a perspektívne možnosti analýzy dopravných nehôd. 2004. Žilinská univerzita v Žiline, ISBN 80-8070-279-9
- KOHÚT, P. – PUPALA, A. Zmena rýchlosti vozidla počas zrážky s chodcom. In: Znalectvo – doprava cestná, elektrotechnika, strojárstvo a iné technické odbory. 2003. No. 1-2/2003, s.2-6. Žilina: Žilinská univerzita v Žiline, ISSN 1335-1133.
Poďakovanie
Tento príspevok bol podporený Agentúrou pre podporu výskumu a vývoja na základe zmluvy č. APVV-20-0626. Tento príspevok bol vypracovaný v rámci projektu APVV-20-0626: Biomechanicky verná náhrada ľudského tela pre zvýšenie objektivity forenznej analýzy cestných dopravných nehôd.
Autori:
Eduard KOLLA 1, Lukáš SZABO 2, Patrik SZABO3
Tituly a pôsobisko autorov:
1 doc. Ing. Eduard Kolla, PhD., Žilinská univerzita v Žiline, Ústav znaleckého výskumu a vzdelávania, Univerzitná 8215/1, Žilina, 010 26, E-mail: kolla@uniza.sk
2 Ing. Lukáš Szabo, Školská 26/39, Nemčice, 955 01, E-mail: lukas.szabo9702@gmail.com
3 Bc. Patrik Szabo, Školská 361/41, Nemčice, 955 01, E-mail: patrik.szabo259@gmail.com
